Generative World Modelling for Humanoids: 1X World Model Challenge Technical Report
Technical report detailing our method that won the 1X World Model Challenge 2025.
Riccardo Mereu
•
•
1 min readTechnical report detailing our method that won the 1X World Model Challenge 2025.
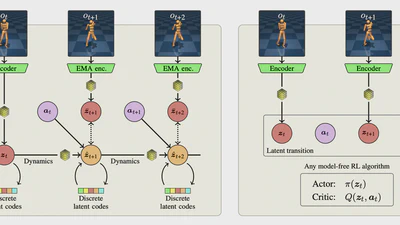
Learning representations for reinforcement learning (RL) has shown much promise for continuous control. In this project, we investigate using vector quantization to prevent …
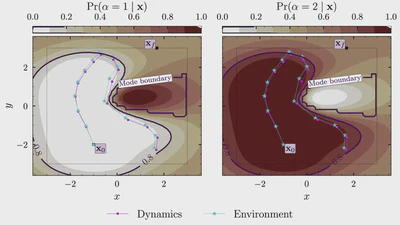
This work presents a learning-based control method for navigating to a target state in unknown, or partially unknown, multimodal dynamical systems. In particular, it develops a …
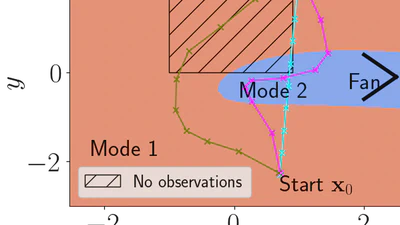
This work presents a two-stage method to perform trajectory optimisation in multimodal dynamical systems with unknown nonlinear stochastic transition dynamics. The method finds …

As part of the FARSCOPE CDT program I worked in a team to develop a solution to Amazon’s picking challenge. This involved designing a robotic pick-and-place system that was capable …

An application was designed following the model-view-controller architecture to enable multiple autonomous vehicle algorithms to be simulated in different views and to allow the …

This project involved developing algorithms capable of localising a robot within a known environment but at an unknown position and moving it to a target location. This was …
