Implicitly Quantized Representations for Reinforcement Learning
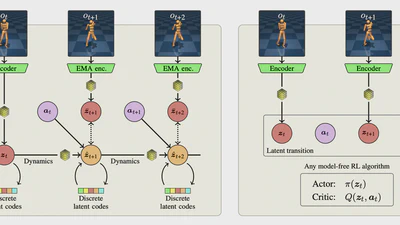
Learning representations for reinforcement learning (RL) has shown much promise for continuous control. In this project, we investigate using vector quantization to prevent …
Aidan Scannell
•
•
1 min read