
Quantized Representations Prevent Dimensional Collapse in Self-predictive RL
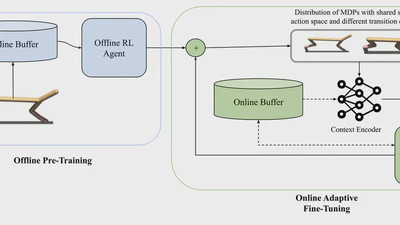
Residual Learning and Context Encoding for Adaptive Offline-to-Online Reinforcement Learning
Mohammadreza Nakhaei
•
•
1 min read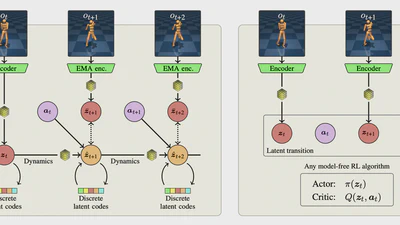
Implicitly Quantized Representations for Reinforcement Learning
Learning representations for reinforcement learning (RL) has shown much promise for continuous control. In this project, we investigate using vector quantization to prevent …
Aidan Scannell
•
•
1 min read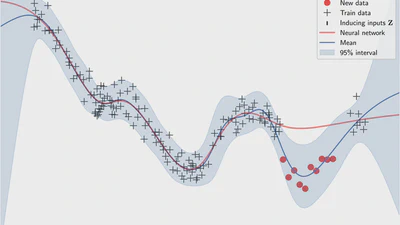
Function-Space Bayesian Deep Learning for Sequential Learning
Sequential learning paradigms pose challenges for gradient-based deep learning due to difficulties incorporating new data and retaining prior knowledge. While Gaussian processes …
Aidan Scannell
•
•
1 min read
Neural Networks as Sparse Gaussian Processes for Sequential Learning
I will be presenting our research on bayesian deep learning for sequential learning at the [International Workshop of Intelligent Autonomous Learning Systems …
Aidan Scannell
•
•
1 min read
Model-based reinforcement learning under uncertainty
Aidan Scannell
•
•
1 min read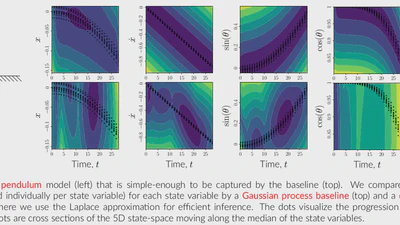
Investigating Bayesian Neural Network Dynamics Models for Model-Based Reinforcement Learning
This project seeks to evaluate and compare different approaches for learning dynamics models in model-based RL. In particular, we plan to compare different approximate inference …
Aidan Scannell
•
•
1 min read
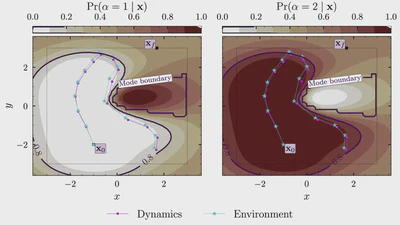
Mode-Constrained Exploration for Model-Based Reinforcement Learning
This work presents a learning-based control method for navigating to a target state in unknown, or partially unknown, multimodal dynamical systems. In particular, it develops a …
Aidan Scannell
•
•
1 min read