Model-based reinforcement learning under uncertainty
Aidan Scannell
•
•
1 min read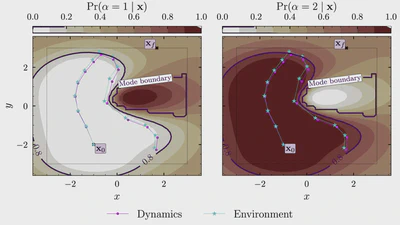
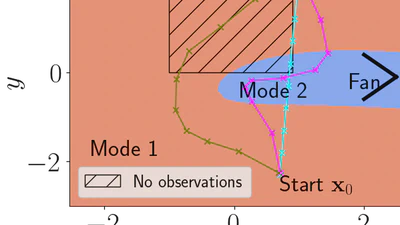
Mode remaining navigation (and exploration) in unknown multimodal dynamical systems via model-based reinforcement learning.
In this talk I will present our ICRA 2021 paper "Trajectory Optimisation in Learned Multimodal Dynamical Systems via Latent-ODE Collocation".
Synergising Bayesian inference and Riemannian geometry for control in multimodal dynamical systems.
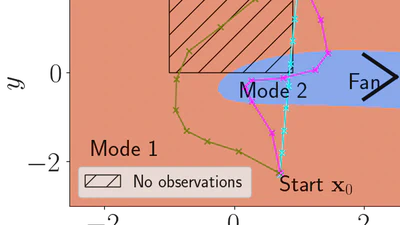
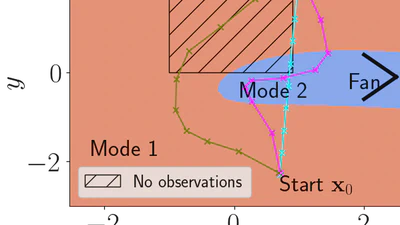
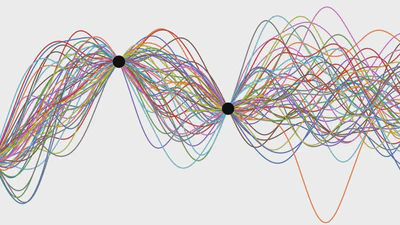
This work presents a two-stage method to perform trajectory optimisation in multimodal dynamical systems with unknown nonlinear stochastic transition dynamics. The method finds …
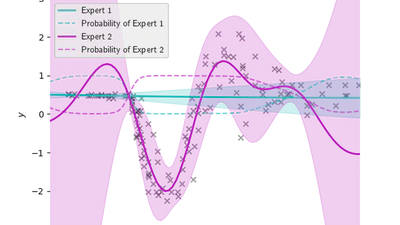
This work introduces a variational lower bound for the Mixture of Gaussian Process Experts model with a GP-based gating network based on sparse GPs. The model (and inference) are …
This post introduces the theory underpinning Gaussian process regression and provides a basic walk-through in python.