Mode-Constrained Exploration for Model-Based Reinforcement Learning
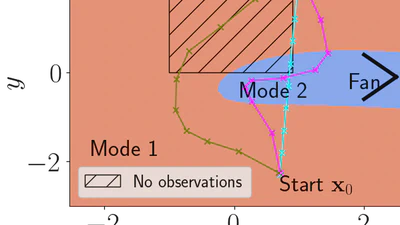
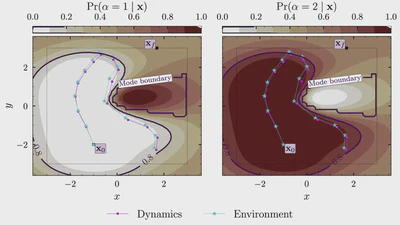
This work presents a learning-based control method for navigating to a target state in unknown, or partially unknown, multimodal dynamical systems. In particular, it develops a …
Aidan Scannell
•
•
1 min read