Trajectory Optimisation in Learned Multimodal Dynamical Systems via Latent-ODE Collocation
Synergising Bayesian inference and Riemannian geometry for control in multimodal dynamical systems.
Synergising Bayesian inference and Riemannian geometry for control in multimodal dynamical systems.
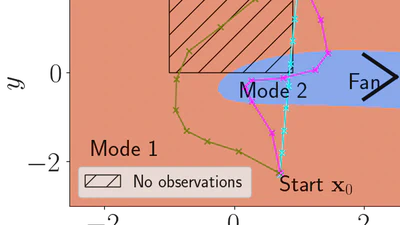
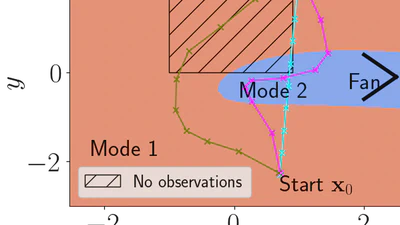
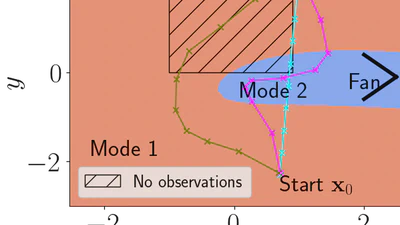
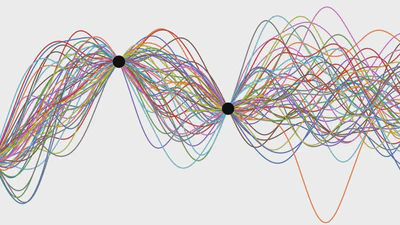
This work presents a two-stage method to perform trajectory optimisation in multimodal dynamical systems with unknown nonlinear stochastic transition dynamics. The method finds …
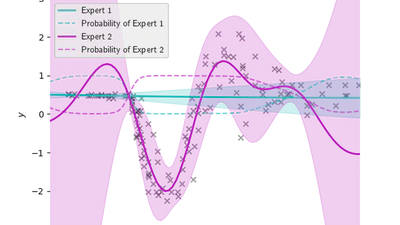
This work introduces a variational lower bound for the Mixture of Gaussian Process Experts model with a GP-based gating network based on sparse GPs. The model (and inference) are …
This post introduces the theory underpinning Gaussian process regression and provides a basic walk-through in python.
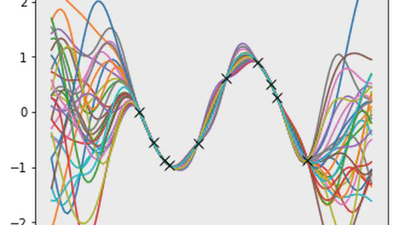
I am in the process of creating Jupyter notebooks for several probabilistic models (Bayesian linear regression, Gaussian process regression) and approximate inference algorithms. …
In this work I re-implemented the PILCO algorithm in python using Tensorflow and GPflow. This work was mainly carried out for personal development and some of the implementation is …
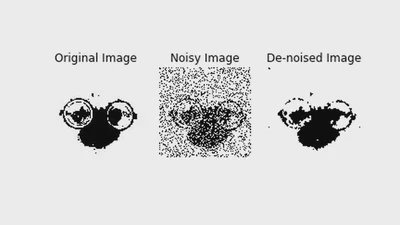
This work implements and compares a variety of approximate inference techniques for the tasks of image de-noising (restoration) and image segmentation.

As part of the FARSCOPE CDT program I worked in a team to develop a solution to Amazon’s picking challenge. This involved designing a robotic pick-and-place system that was capable …