Huawei-Edinburgh Joint Lab: Discrete Codebook World Models
Aidan Scannell
•
•
1 min read
I will be presenting our research on self-supervised representation learning for reinforcement learning at the [International Workshop of Intelligent Autonomous Learning Systems …
I'll be giving a lecture on model-based RL at the Cambridge Ellis Unit Summer School on Probabilistic Machine Learning 2024.
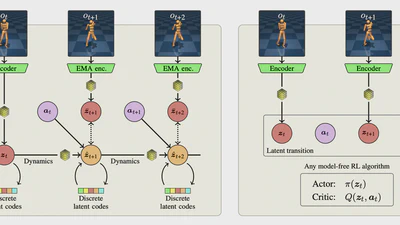
Learning representations for reinforcement learning (RL) has shown much promise for continuous control. In this project, we investigate using vector quantization to prevent …
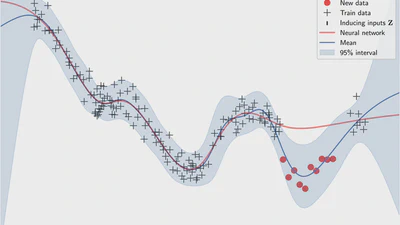
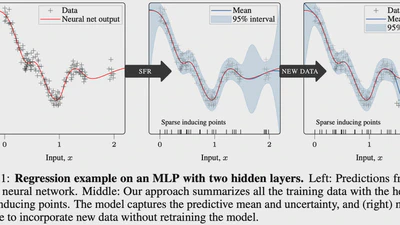
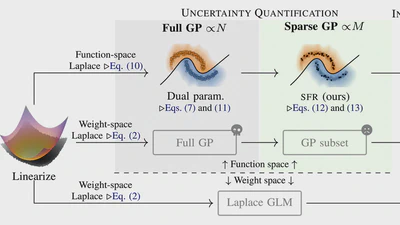
Sequential learning paradigms pose challenges for gradient-based deep learning due to difficulties incorporating new data and retaining prior knowledge. While Gaussian processes …

I will be presenting our research on bayesian deep learning for sequential learning at the [International Workshop of Intelligent Autonomous Learning Systems …