Function-Space Bayesian Deep Learning for Sequential Learning
Sequential learning paradigms pose challenges for gradient-based deep learning due to difficulties incorporating new data and retaining prior knowledge. While Gaussian processes …
Aidan Scannell
•
•
1 min read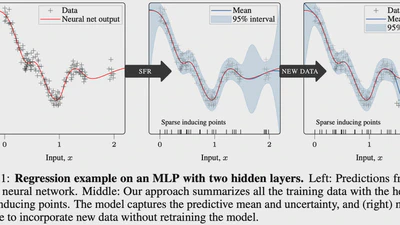
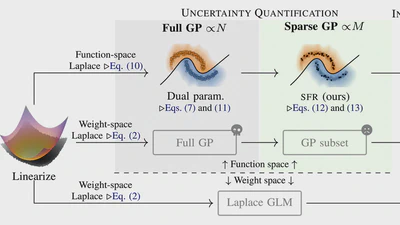
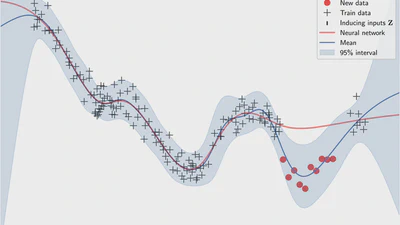
Sparse Function-space Representation of Neural Networks
Mode-constrained Model-based Reinforcement Learning via Gaussian Processes
We present a model-based RL algorithm that constrains training to a single dynamic mode with high probability. This is a difficult problem because the mode constraint is a hidden …
Model-based reinforcement learning under uncertainty
Aidan Scannell
•
•
1 min read
Investigating Bayesian Neural Network Dynamics Models for Model-Based Reinforcement Learning
This project seeks to evaluate and compare different approaches for learning dynamics models in model-based RL. In particular, we plan to compare different approximate inference …
Aidan Scannell
•
•
1 min read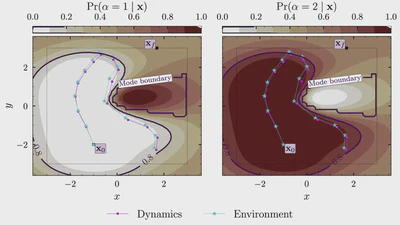
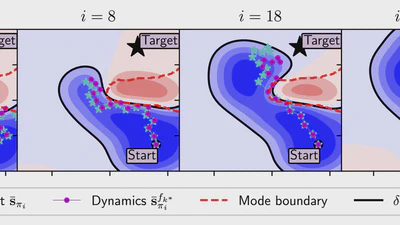
Mode-Constrained Exploration for Model-Based Reinforcement Learning
This work presents a learning-based control method for navigating to a target state in unknown, or partially unknown, multimodal dynamical systems. In particular, it develops a …
Aidan Scannell
•
•
1 min read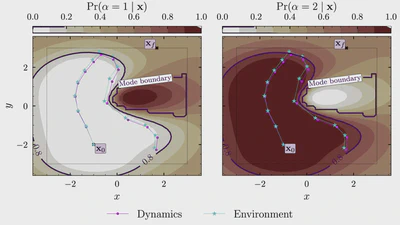
PhD Thesis: Bayesian Learning for Control in Multimodal Dynamical Systems
Mode remaining navigation (and exploration) in unknown multimodal dynamical systems via model-based reinforcement learning.
Trajectory Optimisation in Learned Multimodal Dynamical Systems via Latent-ODE Collocation
In this talk I will present our ICRA 2021 paper "Trajectory Optimisation in Learned Multimodal Dynamical Systems via Latent-ODE Collocation".
Aidan Scannell
•
•
1 min read