PhD Thesis: Bayesian Learning for Control in Multimodal Dynamical Systems
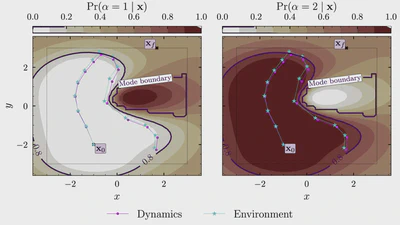
Mode remaining navigation (and exploration) in unknown multimodal dynamical systems via model-based reinforcement learning.
Mode remaining navigation (and exploration) in unknown multimodal dynamical systems via model-based reinforcement learning.
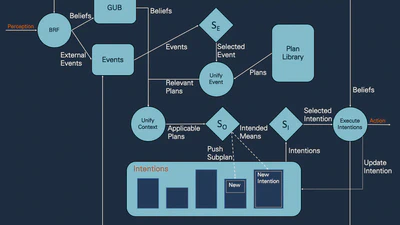
During the first (taught) year of the FARSCOPE CDT program I conducted my masters thesis under the supervision of Professor Weiru Liu and Dr Kevin McAreavey titled “Extending BDI …

As part of the FARSCOPE CDT program I worked in a team to develop a solution to Amazon’s picking challenge. This involved designing a robotic pick-and-place system that was capable …

This project involved developing algorithms capable of localising a robot within a known environment but at an unknown position and moving it to a target location. This was …
