Aidan Scannell
Aidan Scannell
Home
Publications
Talks
Posts
Projects
CV
Notes
robotics
Implicitly Quantized Representations for Reinforcement Learning
Learning representations for reinforcement learning (RL) has shown much promise for continuous control. In this project, we investigate using vector quantization to prevent representation collapse when learning representations for RL using a self-supervised latent-state consistency loss.
Aidan Scannell
,
Kalle Kujanpää
,
Yi Zhao
,
Mohammadreza Nakhaei
,
Arno Solin
,
Joni Pajarinen
PDF
Code
Mode-Constrained Exploration for Model-Based Reinforcement Learning
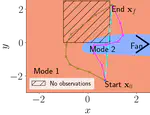
This work presents a learning-based control method for navigating to a target state in unknown, or partially unknown, multimodal dynamical systems. In particular, it develops a model-based reinforcement learning algorithm that can remain in a desired dynamics mode with high probability. For example, if some of the dynamics modes are believed to be inoperable.
Aidan Scannell
,
Carl Henrik Ek
,
Arthur Richards
Code
Source Document
Follow
Trajectory Optimisation in Learned Multimodal Dynamical Systems
This work presents a two-stage method to perform trajectory optimisation in multimodal dynamical systems with unknown nonlinear stochastic transition dynamics. The method finds trajectories that remain in a preferred dynamics mode where possible and in regions of the transition dynamics model that have been observed and can be predicted confidently.
Aidan Scannell
Code
Follow
Amazon Picking Challenge
As part of the FARSCOPE CDT program I worked in a team to develop a solution to Amazon’s picking challenge. This involved designing a robotic pick-and-place system that was capable of recognising and grasping both known and novel objects in cluttered environments.
Aidan Scannell
Follow
Autonomous Vehicle Lane Detection Software
An application was designed following the model-view-controller architecture to enable multiple autonomous vehicle algorithms to be simulated in different views and to allow the input parameters to be altered in run time e.g. adaptive threshold parameters, coordinates for inverse perspective mapping, number of sample points etc. The code will run slower due to the MVC architecture.
Aidan Scannell
Code
Video
Follow
Kidnapped Robot
This project involved developing algorithms capable of localising a robot within a known environment but at an unknown position and moving it to a target location. This was achieved in simulation using the BotSim library in Matlab and then implemented onto a real robot.
Aidan Scannell
PDF
Code
Video
Follow
UAV Swarm
This project involved developing distributed software enabling a swarm of fixed wing UAVs to track a pollutant cloud. A discrete time state space model of the world was produced and a finite state machine was used to add intelligence.
Aidan Scannell
PDF
Code
Video
Follow
Cite
×