Aidan Scannell
Aidan Scannell
Home
Publications
Talks
Posts
Projects
CV
Notes
python
Implicitly Quantized Representations for Reinforcement Learning
Learning representations for reinforcement learning (RL) has shown much promise for continuous control. In this project, we investigate using vector quantization to prevent representation collapse when learning representations for RL using a self-supervised latent-state consistency loss.
Aidan Scannell
,
Kalle Kujanpää
,
Yi Zhao
,
Mohammadreza Nakhaei
,
Arno Solin
,
Joni Pajarinen
PDF
Code
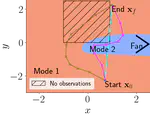
Mode-Constrained Exploration for Model-Based Reinforcement Learning
This work presents a learning-based control method for navigating to a target state in unknown, or partially unknown, multimodal dynamical systems. In particular, it develops a model-based reinforcement learning algorithm that can remain in a desired dynamics mode with high probability. For example, if some of the dynamics modes are believed to be inoperable.
Aidan Scannell
,
Carl Henrik Ek
,
Arthur Richards
Code
Source Document
Follow
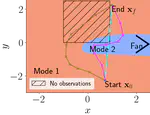
Bayesian Learning for Control in Multimodal Dynamical Systems
Mode remaining navigation (and exploration) in unknown multimodal dynamical systems via model-based reinforcement learning.
Aidan Scannell
PDF
Cite
Code
Slides
Source Document
Trajectory Optimisation in Learned Multimodal Dynamical Systems via Latent-ODE Collocation
In this talk I will present our ICRA 2021 paper “Trajectory Optimisation in Learned Multimodal Dynamical Systems via Latent-ODE Collocation”.
Jun 3, 2021 11:00 AM — 11:30 AM
Xi'an, China
Aidan Scannell
Code
Project
Video
Follow
Identifiable Mixtures of Sparse Variational Gaussian Process Experts
Mixture models are inherently unidentifiable as different combinations of component distributions and mixture weights can generate the …
Aidan Scannell
,
Carl Henrik Ek
,
Arthur Richards
PDF
Code
Project
GPJax - Gaussian Processes in Jax
Minimal Gaussian process library in JAX with a simple (custom) approach to state management.
Aidan Scannell
Code
Follow
Trajectory Optimisation in Learned Multimodal Dynamical Systems via Latent-ODE Collocation
Synergising Bayesian inference and Riemannian geometry for control in multimodal dynamical systems.
Aidan Scannell
,
Carl Henrik Ek
,
Arthur Richards
PDF
Cite
Code
Video
Synergising Bayesian Inference and Probabilistic Geometries for Robotic Control
This talk presented recent work synergising Bayesian inference and probabilistic Riemannian geometries to control multimodal dynamical …
Mar 18, 2021 9:00 AM — 10:00 AM
Cognitive Systems - Technical University of Denmark (DTU)
Aidan Scannell
PDF
Code
Project
Slides
Follow
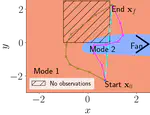
Trajectory Optimisation in Learned Multimodal Dynamical Systems
This work presents a two-stage method to perform trajectory optimisation in multimodal dynamical systems with unknown nonlinear stochastic transition dynamics. The method finds trajectories that remain in a preferred dynamics mode where possible and in regions of the transition dynamics model that have been observed and can be predicted confidently.
Aidan Scannell
Code
Follow
Identifiable Mixtures of Sparse Variational Gaussian Process Experts
This work introduces a variational lower bound for the Mixture of Gaussian Process Experts model with a GP-based gating network based on sparse GPs. The model (and inference) are implemented in GPflow/TensorFlow.
Aidan Scannell
Code
Follow
»
Cite
×