Aidan Scannell
Aidan Scannell
Home
Publications
Talks
Posts
Projects
CV
Notes
optimal-control
Mode-Constrained Exploration for Model-Based Reinforcement Learning
This work presents a learning-based control method for navigating to a target state in unknown, or partially unknown, multimodal dynamical systems. In particular, it develops a model-based reinforcement learning algorithm that can remain in a desired dynamics mode with high probability. For example, if some of the dynamics modes are believed to be inoperable.
Aidan Scannell
,
Carl Henrik Ek
,
Arthur Richards
Code
Source Document
Follow
Trajectory Optimisation in Learned Multimodal Dynamical Systems
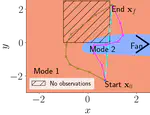
This work presents a two-stage method to perform trajectory optimisation in multimodal dynamical systems with unknown nonlinear stochastic transition dynamics. The method finds trajectories that remain in a preferred dynamics mode where possible and in regions of the transition dynamics model that have been observed and can be predicted confidently.
Aidan Scannell
Code
Follow
Cite
×