Aidan Scannell
Aidan Scannell
Home
Publications
Talks
Posts
Projects
CV
Notes
control
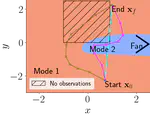
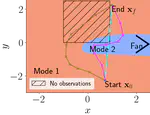
Bayesian Learning for Control in Multimodal Dynamical Systems
Mode remaining navigation (and exploration) in unknown multimodal dynamical systems via model-based reinforcement learning.
Aidan Scannell
PDF
Cite
Code
Slides
Source Document
Aalto RL Reading Club: Simplifying Model-Based RL: Learning Representations, Latent-Space Models, and Policies with One Objective
In this talk I presented “Simplifying Model-Based RL: Learning Representations, Latent-Space Models, and Policies with One …
Sep 23, 2022 11:00 AM — 11:00 AM
Zoom
Aidan Scannell
Slides
Video
Follow
Trajectory Optimisation in Learned Multimodal Dynamical Systems via Latent-ODE Collocation
In this talk I will present our ICRA 2021 paper “Trajectory Optimisation in Learned Multimodal Dynamical Systems via Latent-ODE Collocation”.
Jun 3, 2021 11:00 AM — 11:30 AM
Xi'an, China
Aidan Scannell
Code
Project
Video
Follow
Trajectory Optimisation in Learned Multimodal Dynamical Systems via Latent-ODE Collocation
Synergising Bayesian inference and Riemannian geometry for control in multimodal dynamical systems.
Aidan Scannell
,
Carl Henrik Ek
,
Arthur Richards
PDF
Cite
Code
Video
Synergising Bayesian Inference and Probabilistic Geometries for Robotic Control
This talk presented recent work synergising Bayesian inference and probabilistic Riemannian geometries to control multimodal dynamical …
Mar 18, 2021 9:00 AM — 10:00 AM
Cognitive Systems - Technical University of Denmark (DTU)
Aidan Scannell
PDF
Code
Project
Slides
Follow
Cite
×