PhD Thesis: Bayesian Learning for Control in Multimodal Dynamical Systems
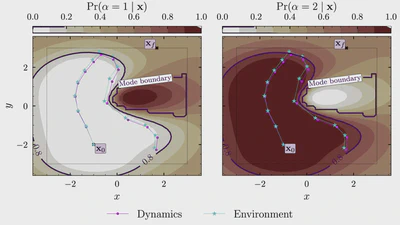
Mode remaining navigation (and exploration) in unknown multimodal dynamical systems via model-based reinforcement learning.
Mode remaining navigation (and exploration) in unknown multimodal dynamical systems via model-based reinforcement learning.