Aidan Scannell
Aidan Scannell
Home
Publications
Talks
Posts
Projects
CV
Notes
1
Discrete Codebook World Models for Continuous Control
In reinforcement learning (RL), world models serve as internal simulators, enabling agents to predict environment dynamics and future …
Aidan Scannell
,
Mohammadreza Nakhaei
,
Kalle Kujanpää
,
Yi Zhao
,
Kevin Luck
,
Arno Solin
,
Joni Pajarinen
PDF
Cite
Code
Slides
Video
Website
Entropy Regularized Task Representation Learning for Offline Meta-Reinforcement Learning
Offline meta-reinforcement learning aims to equip agents with the ability to rapidly adapt to new tasks by training on data from a set …
Mohammadreza Nakhaei
,
Aidan Scannell
,
Joni Pajarinen
PDF
Cite
Code
Residual Learning and Context Encoding for Adaptive Offline-to-Online Reinforcement Learning
Offline reinforcement learning (RL) allows learning sequential behavior from fixed datasets. Since offline datasets do not cover all …
Mohammadreza Nakhaei
,
Aidan Scannell
,
Joni Pajarinen
PDF
Cite
Code
Function-space Parameterization of Neural Networks for Sequential Learning
Sequential learning paradigms pose challenges for gradient-based deep learning due to difficulties incorporating new data and retaining …
Aidan Scannell
,
Riccardo Mereu
,
Paul Chang
,
Ella Tamir
,
Joni Pajarinen
,
Arno Solin
PDF
Cite
Code
Poster
Slides
Website
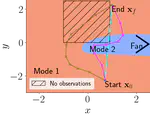
Mode-constrained Model-based Reinforcement Learning via Gaussian Processes
We present a model-based RL algorithm that constrains training to a single dynamic mode with high probability. This is a difficult problem because the mode constraint is a hidden variable associated with the environment’s dynamics. As such, it is 1) unknown a priori and 2) we do not observe its output from the environment, so cannot learn it with supervised learning.
Aidan Scannell
,
Carl Henrik Ek
,
Arthur Richards
PDF
Cite
Code
Project
Poster
Source Document
Follow
Trajectory Optimisation in Learned Multimodal Dynamical Systems via Latent-ODE Collocation
Synergising Bayesian inference and Riemannian geometry for control in multimodal dynamical systems.
Aidan Scannell
,
Carl Henrik Ek
,
Arthur Richards
PDF
Cite
Code
Video
Cite
×