Projects
Here’s some projects that I’ve worked on over the years.
Here’s some projects that I’ve worked on over the years.
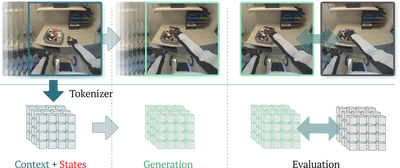
Introduction World models equip agents (e.g., humanoid robots) with internal simulators of their environments. By “imagining” the consequences of their actions, agents can plan, …
In reinforcement learning (RL), world models serve as internal simulators, enabling agents to predict environment dynamics and future outcomes in order to make informed decisions. …
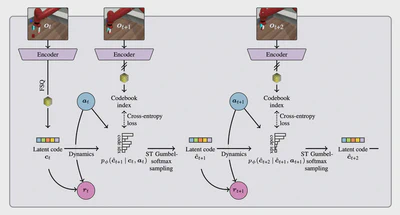
Learning representations for reinforcement learning (RL) has shown much promise for continuous control. In this project, we investigate using vector quantization to prevent …
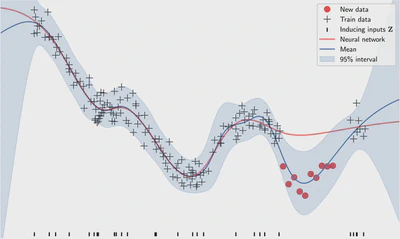
Sequential learning paradigms pose challenges for gradient-based deep learning due to difficulties incorporating new data and retaining prior knowledge. While Gaussian processes …
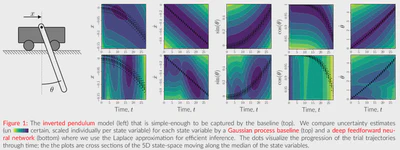
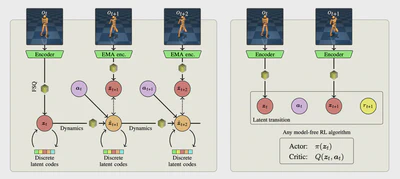
This project seeks to evaluate and compare different approaches for learning dynamics models in model-based RL. In particular, we plan to compare different approximate inference …
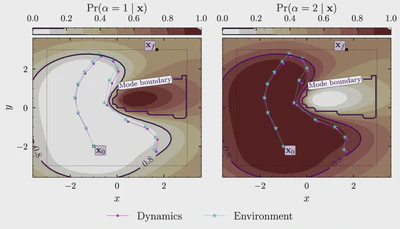
This work presents a learning-based control method for navigating to a target state in unknown, or partially unknown, multimodal dynamical systems. In particular, it develops a …
Minimal Gaussian process library in JAX with a simple (custom) approach to state management.
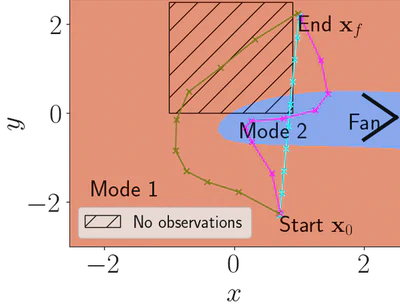
This work presents a two-stage method to perform trajectory optimisation in multimodal dynamical systems with unknown nonlinear stochastic transition dynamics. The method finds …
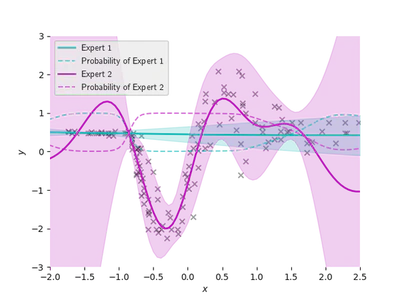
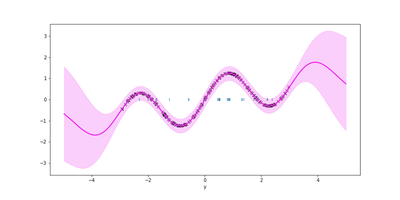
This work introduces a variational lower bound for the Mixture of Gaussian Process Experts model with a GP-based gating network based on sparse GPs. The model (and inference) are …
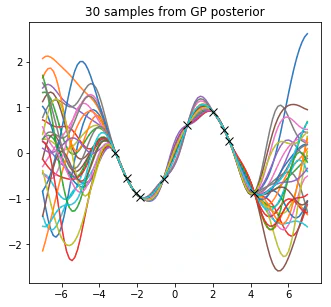
I am in the process of creating Jupyter notebooks for several probabilistic models (Bayesian linear regression, Gaussian process regression) and approximate inference algorithms. …