Winning the 1X World Model Challenge
A deep dive into how we won the ICCV 2025 phase of the 1X Humanoid World Model Challenge.
Hello, I’m Aidan, a researcher working at the intersection of machine learning, sequential decision-making, and embodied AI. My research is driven by the goal of building autonomous agents that can learn and generalize behaviours across a wide range of tasks. I’m particularly interested in methods and architectures for learning world models, and in understanding how agents can leverage them to solve new tasks efficiently.
I’m a Research Scientist at TRI working on world models, and how they can be used for policy learning and evaluation. Previously, I was a Research Associate at the University of Edinburgh in The Bayesian and Neural Systems Group working with Amos Storkey and Peter Bell. Before that, I was a Finnish Center for Artificial Intelligence postdoctoral researcher at Aalto University, where I led FCAI’s Long Term Decision-Making team, whilst sitting in Joni Pajarinen’s Robot Learning Lab and Arno Solin’s Machine Learning Research Group. I obtained my PhD from the University of Bristol under the supervision of Arthur Richards and Carl Henrik Ek. During my PhD I developed methods for controlling quadcopters in uncertain environments by synergising methods from probabilistic machine learning, stochastic differential geometry and reinforcement learning.
[23.07.26] I’ve joined TRI as a Research Scientist 🎉
[15.06.26] Our paper Forgetting is Everywhere was accepted as an oral presentation at CoLLAs 2026 and at the Continual Reinforcement Learning Workshop at RLC 2026 (led by Ben Sanati).
[14.06.26] Our paper Benchmarking Language Agents on Open-Ended Multi-Agent Coordination in Game Worlds was accepted as an oral presentation at Reinforcement Learning and Video Games Workshop @ RLC 2026 (led by Kale-ab Tessera).
[09.06.26] New preprint Benchmarking Open-Ended Multi-Agent Coordination in Language Agents (led by Kale-ab Tessera).
[02.06.26] New paper accepted to ICML 2026 - Kalman Linear Attention: Parallel Bayesian Filtering For Efficient Language Modelling and State Tracking (led by Vaisakh Shaj).
A deep dive into how we won the ICCV 2025 phase of the 1X Humanoid World Model Challenge.
Presenting our methods for winning both tracks of the 1X world model challenge.

Introduction World models equip agents (e.g., humanoid robots) with internal simulators of their environments. By “imagining” the consequences of their actions, agents can plan, …
In reinforcement learning (RL), world models serve as internal simulators, enabling agents to predict environment dynamics and future outcomes in order to make informed decisions. …
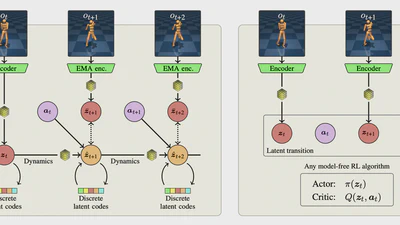
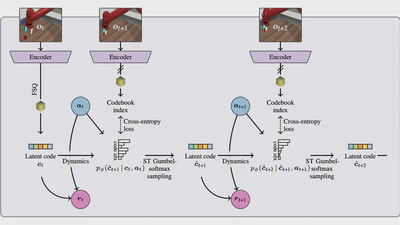
Learning representations for reinforcement learning (RL) has shown much promise for continuous control. In this project, we investigate using vector quantization to prevent …